Room 202-3, Building 30, No. 220 Xianggong Road, Xiangzhou District, Zhuhai City
08.00 AM-09.00 PM
In the fast‑moving world of robotics, selecting the correct motor is a pivotal decision that can make or break a project. While the term “motor” might sound generic, two major families dominate the field—gear motors and regular (direct‑drive) motors. Both have distinct strengths and weaknesses, and their suitability depends on a handful of key parameters. This article dissects those parameters and offers a practical framework for robotics enterprises to choose wisely, especially as the industry heads into a new era of AI‑powered automation and collaborative robots.
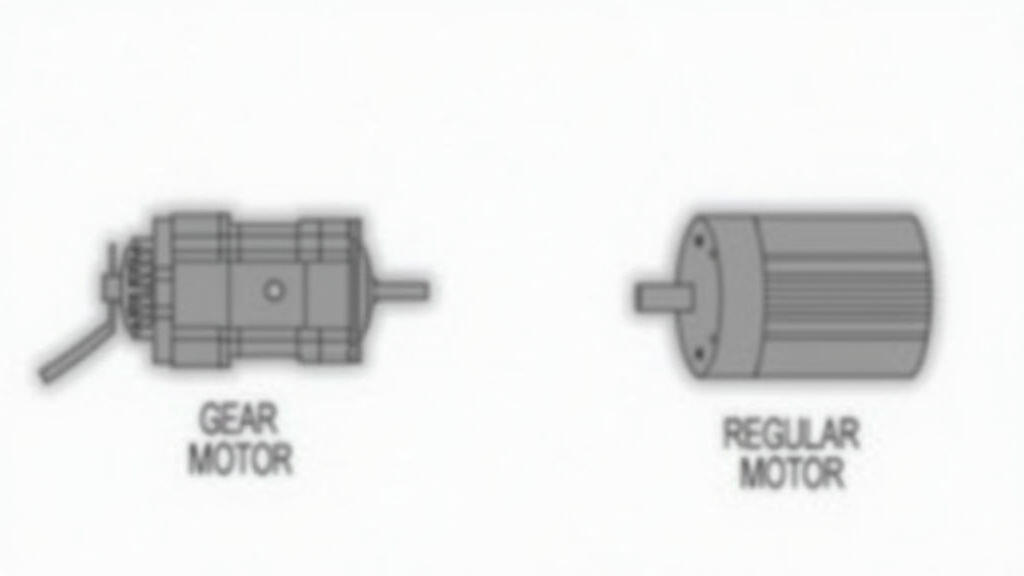
A gear motor integrates an electric motor with a built‑in gearbox. The gearbox steps down the high speed of the motor to deliver high torque at a lower speed, directly turning the load without a separate drive. A regular motor (often a brushless DC or stepper motor) operates without a gearbox. It offers high speed and precision, but achieving the required torque for heavy loads typically requires a separate gear or pulley system outside the motor.
Gear motors are prized for delivering high torque at low speeds—ideal for gripping, lifting, or steering mechanisms. Regular motors excel in high speed and smooth motion but need extra gearing for a torque boost. If your robot must exert substantial force quickly, a gear motor may be the natural choice.
Integrating gearboxes into the motor keeps the overall package compact, reducing the design footprint on a robot’s chassis. However, gearboxes add weight. If weight minimization is critical (e.g., lightweight drones or small surface robots), a regular motor with an external gearbox might be lighter overall when the gearbox is distributed across multiple points.
Power delivered to the load without friction losses is more efficient in regular motors—especially at high speeds. Gearboxes introduce mechanical losses and can heat up, requiring better cooling or leading to performance drop. In prolonged industrial tasks with continuous load, the sustained efficiency of regular motors can be advantageous.
Gear transients and backlash in gear motors produce higher vibration and noise, which might upset delicate tasks like surgical robotics. Regular motors, when paired with precise gearing, can offer smoother operation with lower acoustic signatures.
Direct‑drive regular motors can provide finer control of speed and position due to fewer mechanical steps between power source and load. Gear motors, with their internal gearbox, may suffer from backlash, altering the actual position relative to the commanded value—problematic for high‑precision pick‑and‑place robots.
Less internal moving parts mean gear motors can be mechanically robust but can suffer from wear in gear teeth, requiring periodic replacement. Regular motors generally need only internal component upkeep (brushes, bearings), and their external gearboxes (if any) can be serviced separately, offering modular replacement.
While gear motors are convenient and often cheaper in a bundled form, they may suffer from higher upfront cost per unit torque compared to building a custom regular motor system. Pricing trends show stock markets in 2025 favoring modular, programmable systems—giving regular motors a competitive edge for custom builds.
Case A – Collaborative Industrial Arm: Designed for close human interaction, it uses a brushless DC motor with an external geared belt system, eliminating backlash for high precision while keeping the arm light. The motor’s high speed and smooth acceleration reduce strain on workers.
Case B – Autonomous Mobile Vehicle (AMV) for Warehouse Logistics: Requires reliable, low‑speed high‑torque drive for navigating uneven floors. Engineers opted for integrated gear shafts within a robust motor, offering quick acceleration and easy maintenance in a rugged environment.
The robotics sector is witnessing a surge in hybrid drives that combine the best of both worlds: gearless torque converters and smart gearboxes that adjust gear ratios on the fly. 2026’s “Mixed‑Drive Summit” showcased prototypes that dynamically switch from high‑torque gear mode to high‑speed direct mode, driven by AI algorithms optimizing for energy consumption and task demands. For enterprises, investing in adaptable drive systems aligns with emerging standards like ISO 23164:2025 for collaborative robots, promising safer, smarter operations.
When a robotics enterprise chooses between gear motors and regular motors, it must weigh torque versus speed, footprint, efficiency, noise, precision, reliability, and cost. Gear motors shine in compact, high‑torque scenarios, while regular motors offer speed, precision, and potentially lower ongoing maintenance when external gearing is employed. Emerging hybrid solutions—automated gear ratios, smart power electronics—signal a future where the distinction blurs, enabling robots to self‑optimize for any task. In the context of the current wave of AI‑powered automation, selecting the right motor now is not just a technical decision but a strategic move toward scalable, efficient, and competitive robotics solutions.

Leave A Reply
Your email address will not be published. Required fiels are marked